



19.ABB示教器有三种模式,分别为:自动模式、( )、手动全速模式。

答案解析
相关题目
53、.ABB机器人示教器编程和Robotstduio软件离线编程都有哪些优缺点?(开放答题,不一定按照以下描述进行回答。)
52.请解释ABB指令MoveL offs( ),v500,fine,tool1\wobj:=wobj1代表什么意思?MoveL 直线形式运动Offs( ), 以p10点作为基准点,在此基础上x方向平移10mm,z方向平移20mm。v500, 运动速度,v500fine, 精确到达该点tool1 工具坐标,采用系统默认tool1wobj:=wobj1。 工件坐标,采用wobj1的工件坐标
51.工业机器人奇异点是什么?有哪些位置属于奇异点?机械臂的奇异点是指在机器人运动学中,当机械臂处于某些特定位置或姿态时,其雅可比矩阵( )变得奇异( ),导致雅可比矩阵不可逆。这种情况下,机械臂的某些运动自由度会丢失,无法准确控制末端执行器的速度和方向,导致运动学解算出现问题。工业机器人的奇异点是不可避免的,属于运动机构的机械特性。一般来讲,六自由度串联机器人存在三种类型的奇异点,分别为腕部奇异、肘部奇异和肩部奇异。在这些奇异点附近,机器人会出现自由度减少或者末端微小的运动导致关节速度发生突变。
A.BB机器人指令中MoveL、MoveJ、MoveC有什么区别,分别代表什么意思。
48请解释ABB指令MoveJ p10,v500,fine,tool1\wobj:=wobj1代表什么意思。MoveJ 关节形式运动p10, 运动点位,名称为p10v500, 运动速度,v500fine, 精确到达该点tool1 工具坐标,采用系统默认tool1wobj:=wobj1。 工件坐标,采用wobj1的工件坐标49.指出示教器( )按钮作用,仿真示教器上Enable按钮作用?
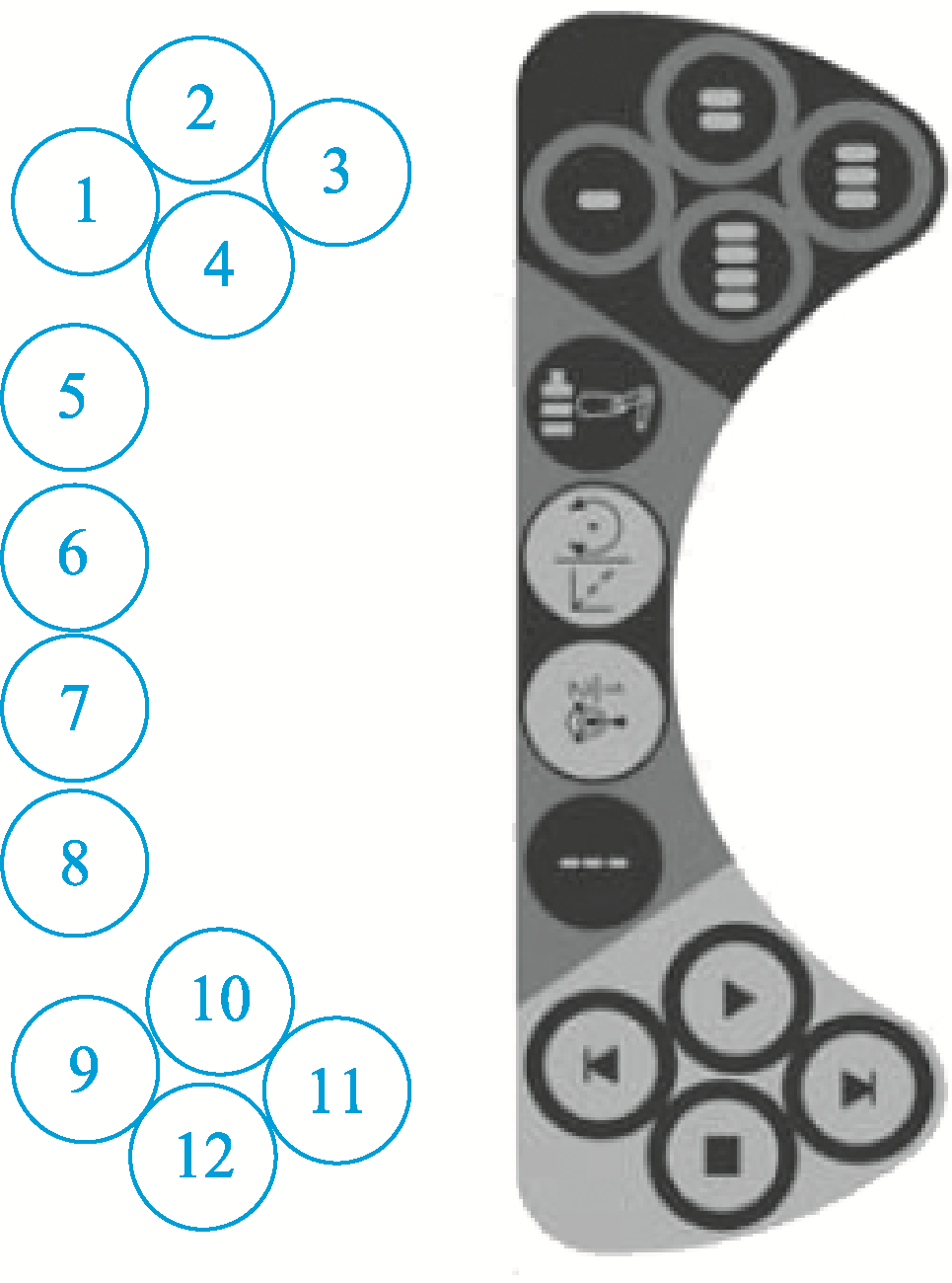
 编号为1号按钮:用户自定义快捷按钮编号为7号按钮:切换运动模式,轴1~3或轴4~6编号为10号按钮:START( )按钮。编号为12号按钮:STOP( )按钮。
编号为1号按钮:用户自定义快捷按钮编号为7号按钮:切换运动模式,轴1~3或轴4~6编号为10号按钮:START( )按钮。编号为12号按钮:STOP( )按钮。
当前状态下拨动拨杆机器人会随着示教器指令移动么?
5轴.示教机器人5轴,让5轴发生动作,需要将右侧拨杆往哪个方向拨动?
1、.下图所示按钮是什么?功能是什么?
47..根据ABB示教器界面,分析机器人状态,回答以下问题。
1、.当前状态下拨动拨杆机器人会随着示教器指令移动么?需要补充哪些操作?






