



×
填空题
48请解释ABB指令MoveJ p10,v500,fine,tool1\wobj:=wobj1代表什么意思。MoveJ 关节形式运动p10, 运动点位,名称为p10v500, 运动速度,v500fine, 精确到达该点tool1 工具坐标,采用系统默认tool1wobj:=wobj1。 工件坐标,采用wobj1的工件坐标

48请解释ABB指令MoveJ p10,v500,fine,tool1\wobj:=wobj1代表什么意思。MoveJ 关节形式运动p10, 运动点位,名称为p10v500, 运动速度,v500fine, 精确到达该点tool1 工具坐标,采用系统默认tool1wobj:=wobj1。 工件坐标,采用wobj1的工件坐标 49.指出示教器( )按钮作用,仿真示教器上Enable按钮作用?
49.指出示教器( )按钮作用,仿真示教器上Enable按钮作用?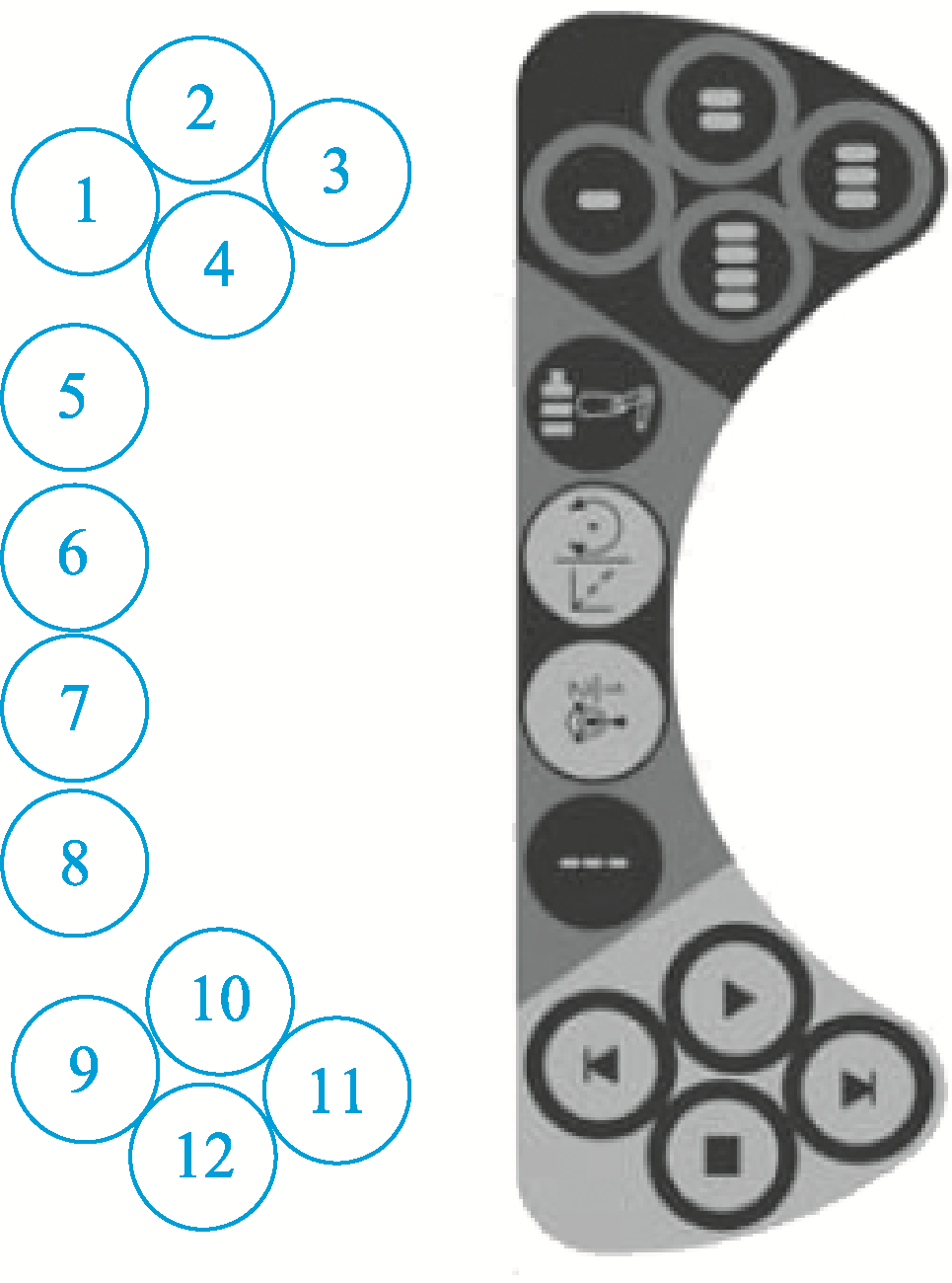
 编号为1号按钮:用户自定义快捷按钮编号为7号按钮:切换运动模式,轴1~3或轴4~6编号为10号按钮:START( )按钮。编号为12号按钮:STOP( )按钮。
编号为1号按钮:用户自定义快捷按钮编号为7号按钮:切换运动模式,轴1~3或轴4~6编号为10号按钮:START( )按钮。编号为12号按钮:STOP( )按钮。
答案解析
正确答案:1,7,10,12、启动、停止
题目纠错
工业机器人离线编程题库
相关题目
单选题
23.国际上工业机器人中的四巨头指的是( )、( )、安川电机、库卡。
单选题
22. ( )指令常用于机器人回到机械零点的位置或Home点。
单选题
21.在RobotStudio工作站中滚动鼠标中键可以实现( )功能。
单选题
20.在RobotStudio工作站中常用调整工作站视图旋转可以采用()那么视图平移可以采用( )。
单选题
19.ABB示教器有三种模式,分别为:自动模式、( )、手动全速模式。
单选题
( )28. ABB机器人示教器使能开关,握紧是ON,放手是OFF,如果握紧特别用力。则出现()(状态。
单选题
( )27. 机器人轨迹求解是通过计算()(以获得各个关节角的位置系统设定值。
单选题
( )26. ABB机器人电机一般选用()(。
单选题
( )25.在自动模式下,工作中的ABB机器人突然停机,最不可能的原因是()(。
单选题
( )24. PLC工作方式为()(工作方式。






