308.力传感器安装在工业机器人上的位置,通常不会在()位置上。
A. 关节驱动器轴
B. 机器人腕部
C. 手指指尖
D. 机座
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a640d.html
点击查看答案
258.国际上机器人四大家族指的是()。
①瑞典ABB;②日本FANUC;③日本YASKAWA;④德国KUKA;⑤日本OTC
A. ①②③④
B. ①②③⑤
C. ②③④⑤
D. ①③④⑤
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a6422.html
点击查看答案
466.允许机器人手臂各零件之间发生相对运动的机构称为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a6419.html
点击查看答案
190.()在操控控制柜的线路时请佩戴好去静电手环。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a641c.html
点击查看答案
160.()永磁式步进电机步距大,起动频率高,控制功率大。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-91c0-c091-da481f4a6425.html
点击查看答案
38.下面各选项中,()不是并联电路的特点。
A. 加在各并联支路两端的电压相等
B. 电路内的总电流等于各分支电路的电流之和
C. 并联电阻越多,则总电阻越小,且其值小于任一支路的电阻值
D. 电流处处相等
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a641b.html
点击查看答案
458.螺纹副在摩擦系数一定时,螺纹的牙型角越大,则()。
A. 当量摩擦系数越小,自锁性能越好
B. 当量摩擦系数越小,自锁性能越差
C. 当量摩擦系数越大,自锁性能越差
D. 当量摩擦系数越大,自锁性能越好
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a6411.html
点击查看答案
532.机械传动中,转轴是指()。
A. 只受弯矩
B. 只受扭矩
C. 既受弯矩又受扭矩
D. 只受剪力
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6e78-c091-da481f4a6413.html
点击查看答案
195.()严禁任何非专业人员、非受训人员私自操作。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a6421.html
点击查看答案
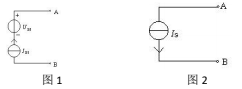
556.已知下图1中的US1=4V,IS1=2A。用下图2所示的等效理想电流源代替图1所示的电路,该等效电流源的参数为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6406.html
点击查看答案









