322.工业机器人运动自由度数,一般()。
A. 小于2个
B. 小于3个
C. 小于6个
D. 大于6个
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a641b.html
点击查看答案
8.()工业机器人的机械结构系统由基座、手臂、手腕、末端操作器4大件组成。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8608-c091-da481f4a6402.html
点击查看答案
114.()机构自由度只取决于活动的构件数目。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a641e.html
点击查看答案
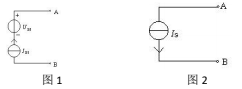
556.已知下图1中的US1=4V,IS1=2A。用下图2所示的等效理想电流源代替图1所示的电路,该等效电流源的参数为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6406.html
点击查看答案
282.()三端集成稳压器的输出有正、负之分,应根据需要正确的使用。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a6403.html
点击查看答案
336.()对于不可逆的调速系统,可以采用两组反并联晶闸管变流器来实现快速回馈制动。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6412.html
点击查看答案
295.()用8421BCD码表示的十进制数字,必须经译码后才能用七段数码显示器显示出来。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a6410.html
点击查看答案
90.三相交流异步电动机降压启动是指启动时降低加在电动机()绕组上的电压,启动运转后,再使其电压恢复到额定电压正常运行。
A. 转子
B. 定子
C. 定子及转子
D. 以上都不对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a640a.html
点击查看答案
43.下列选项中,()参数不能用示波器来测量。
A. 周期
B. 频率
C. 直流电压
D. 直流电流
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a6420.html
点击查看答案
389.谐波减速器的刚轮是一个刚性齿轮,其齿轮为()。
A. 内齿
B. 外齿
C. 没有齿
D. 内外都有齿
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a6415.html
点击查看答案











