13.码垛机器人常见的末端执行器分为()。
A. 吸附式
B. 夹板式
C. 抓取式
D. 组合式
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-2f88-c091-da481f4a640c.html
点击查看答案
524.气动仪表中,()将检测气信号转换为标准气信号。
A. 变送器
B. 比值器
C. 调节器
D. 转换器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6e78-c091-da481f4a640b.html
点击查看答案
189.自动生产流水线电气部分,由顺序控制器装置、执行器、被控对象和检测元件组成,其中核心部分是
()。
A. 执行器
B. 被控对象
C. 顺序控制器
D. 检测元件
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4b50-c091-da481f4a6400.html
点击查看答案
586.理想二极管导通时相当于开关()。
A. 断开
B. 接通短路
C. 损坏
D. 不变
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7648-c091-da481f4a6401.html
点击查看答案
35.工业机器人的气吸吸盘由()组成。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3370-c091-da481f4a640c.html
点击查看答案
439.反馈控制是在控制过程中不断调整被控制量如位移、速度、等连续变化的物理量,使之达到()的控制方式。
A. 反馈控制
B. 预期设定值
C. 开环
D. 顺序
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-62c0-c091-da481f4a6423.html
点击查看答案
569.下图所示电路中,节点a的节点电压方程为()。
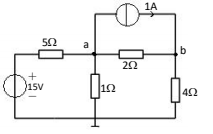
A. 8Ua-2Ub=2
B. 1.7Ua-0.5Ub=2
C. 1.7Ua+0.5Ub=2
D. 1.7Ua-0.5Ub=-2
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6413.html
点击查看答案
591.设位置的确定精度为0.02mm。滚珠丝杠每转一转,滚珠螺母移动5mm,减速比为Z1/Z2=1/10,则每转一转对应的脉冲数应为()。
A. 50个脉冲/转
B. 100个脉冲/转
C. 250个脉冲/转
D. 25个脉冲/转
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7648-c091-da481f4a6406.html
点击查看答案
188.()自由度可以用机器人的轴数进行描述,机器人的轴数越多,自由度就越多,自由度就越多,机械结构运行的灵活性就越大,通用性就越强。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a641a.html
点击查看答案
529.被联接件之一太厚不宜制成通孔,且需要经常拆卸时,往往采用()。
A. 螺栓联接
B. 螺钉联接
C. 紧定螺钉联接
D. 双头螺柱联接
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6e78-c091-da481f4a6410.html
点击查看答案









