292.()异步计数器的工作速度一般高于同步计数器。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a640d.html
点击查看答案
92.()更改工具变换数据会导致机器人当前直交位置数据变化。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6408.html
点击查看答案
486.要求多路换向阀控制的多个执行元件实现两个以上执行机构的复合动作,多路换向阀的连接方式为
()。
A. 串联油路
B. 并联油路
C. 串并联油路
D. 其他
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6a90-c091-da481f4a6408.html
点击查看答案
566.下图所示电路中,流过元件A的电流I等于()。
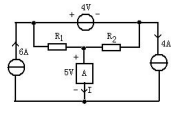
A. 1A
B. 2A
C. -1A
D. -2A
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6410.html
点击查看答案
427.在工业机器人焊接的应用中,需要根据工作要求不断调整姿态,这就需要示教员在手动操作进行线性运动的同时,还要使用()进行姿态的调整。
A. 重定位运动
B. 线性运动
C. 自动运动
D. 单步运动
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-62c0-c091-da481f4a6417.html
点击查看答案
113.()机器人第六轴上的夹具或其他末端执行器的信号线和气管是只能走机器人本体内部的,不能外走线。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a641d.html
点击查看答案
276.工业机器人设备上有急停开关,开关颜色为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5320-c091-da481f4a6410.html
点击查看答案
67.机器人的定位精度是指机器人末端执行器的实际位置与目标位置之间的偏差,由()与系统分辨率等部分组成。
A. 机械误差
B. 控制算法
C. 随机误差
D. 系统误差
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a640a.html
点击查看答案
16.()机器人末端执行器吸附式取料手适用与大平面、易碎、微小的物品。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8608-c091-da481f4a640a.html
点击查看答案
336.()按照工序能自动检查产品的装配,并作出反应。即使发生错误,都是在一批产品的同一地方,很容易发现发错。
A. 检查、测量机器人
B. 装配机器人
C. 移动式搬运机器人
D. 码垛机器人
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5af0-c091-da481f4a6405.html
点击查看答案









