



A、 (x<z)&&(y<x)
B、 (x<z)||(y<x)
C、 (y>z)||(y
D、 (y>z)&&(y
答案:D


A、 (x<z)&&(y<x)
B、 (x<z)||(y<x)
C、 (y>z)||(y
D、 (y>z)&&(y
答案:D


A. 正确
B. 错误
A. 灵敏度
B. 重复性
C. 精度
D. 分辨率
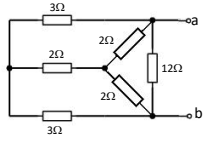
A. 2Ω
B. 6Ω
C. 8Ω
D. 10Ω
A. 正确
B. 错误
A. 正确
B. 错误
A. 正确
B. 错误
A. 执行环节
B. 传感环节
C. 控制环节
D. 保护环节
A. 正确
B. 错误
A. N
B. 2N
C. 3N
D. 4N
A. 控制柜铭牌
B. 示教器
C. 操作面板
D. 驱动板

