293.安全标识牌有多种类型,拥有的类型总数量是()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5320-c091-da481f4a6421.html
点击查看答案
114.()机构自由度只取决于活动的构件数目。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a641e.html
点击查看答案
22.党的二十大报告中指出,全党要坚持全心全意为人民服务的根本宗旨,树牢群众观点,贯彻群众路线,尊重人民( )精神,坚持一切为了人民、一切依靠人民,从群众中来、到群众中去。
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3930-c091-da481f4a640c.html
点击查看答案
63.()是PLC的输出信号,用来控制外部负载。
A. 输入继电器
B. 输出继电器
C. 辅助继电器
D. 计数器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3bb0-c091-da481f4a6411.html
点击查看答案
55.()灵活性低的工业机器人,其外围设备较为复杂。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-89f0-c091-da481f4a640a.html
点击查看答案
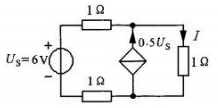
565.分析下图所示电路,电流I等于()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a640f.html
点击查看答案
331.()晶闸管直流调速系统机械特性可分为连续段和断续段,断续段特性的出现,主要是因为晶闸管导通角θ太小,使电流断续。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a640d.html
点击查看答案
62.PLC控制系统与继电控制系统之间存在元件触点数量、工作方式和()的差异。
A. 开发方式
B. 工作环境
C. 生产效率
D. 设备操作方式
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3bb0-c091-da481f4a6410.html
点击查看答案
418.()是指机器人的指、肢和关节等运动中所受力的感知。
A. 力觉
B. 接近觉
C. 触觉
D. 温度觉
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-62c0-c091-da481f4a640e.html
点击查看答案
228.工业机器人常用的行走机座是()。
A. 二轮车
B. 三轮车
C. 两足行走机构
D. 导轨
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a6404.html
点击查看答案











