269.当工业机器人发生火灾时,应使用的灭火器类型是()。
A. 干粉灭火器
B. 泡沫灭火器
C. 卤代烷灭火器
D. 二氧化碳灭火器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5320-c091-da481f4a6409.html
点击查看答案
206.()机器人需要绕着工具TCP点做姿态调整运动的模式成为“重定位运动”。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9990-c091-da481f4a6405.html
点击查看答案
18.()机器人末端执行器摆动式手爪适应于圆柱表面物体的抓取。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8608-c091-da481f4a640c.html
点击查看答案
15.党的二十大报告中指出,要增强维护国家安全能力,坚定维护( ),确保粮食、能源资源、重要产业链供应链安全,维护我国公民、法人在海外合法权益,筑牢国家安全人民防线。
A. 粮食安全
B. 国家政权安全
C. 制度安全
D. 意识形态安全
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3d18-c091-da481f4a641b.html
点击查看答案
451.单稳态触发器的输出状态有()
A. 一个稳态、一个暂态
B. 两个稳态
C. 只有一个稳态
D. 没有稳态
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a640a.html
点击查看答案
152.()对机器人关节驱动的电机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-91c0-c091-da481f4a641d.html
点击查看答案
300.在()可以找到机器人的序列号。
A. 控制柜铭牌
B. 示教器
C. 操作面板
D. 驱动板
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a6405.html
点击查看答案
569.下图所示电路中,节点a的节点电压方程为()。
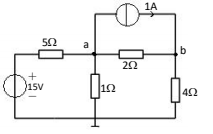
A. 8Ua-2Ub=2
B. 1.7Ua-0.5Ub=2
C. 1.7Ua+0.5Ub=2
D. 1.7Ua-0.5Ub=-2
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6413.html
点击查看答案
585.已知交流RL串联电路,总电压U=10V,电阻R上电压UR=6V,则电感上电压UL=()V。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7648-c091-da481f4a6400.html
点击查看答案
165.将二进制数010101011001转换为十进制数是()。
A. 559
B. 1369
C. 1631
D. 3161
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a640d.html
点击查看答案











