



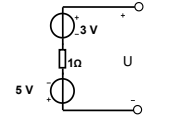
A、 8V
B、 -2V
C、 2V
D、 -4V
答案:B


A、 8V
B、 -2V
C、 2V
D、 -4V
答案:B


A. 从关节空间到操作空间的变换
B. 从操作空间到迪卡尔空间的变换
C. 从迪卡尔空间到关节空间的变换
D. 从操作空间到关节空间的变换
A. 正确
B. 错误
A. 直线运动
B. 曲线运动
C. 圆周运动
D. 单摆运动
A. 正确
B. 错误
A. 具有人的形象
B. 模仿人和生物的功能
C. 像人一样思维
D. 感知能力很强
A. 力控制方式
B. 轨迹控制方式
C. 示教控制方式
D. 运动控制方式
A. 小于10mm/s
B. 接近250mm/s
C. 大于800mm/s
D. 大于1600mm/s
A. 压觉材料
B. 压阻材料
C. 压磁材料
D. 压敏材料
A. 正确
B. 错误
A. 正确
B. 错误

