84.交流接触器的额定工作电压是指在规定条件下,能保证正常工作的()电压。
A. 最低
B. 最高
C. 平均
D. 以上都不对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a6404.html
点击查看答案
327.()调速系统中,电流截止负反馈是一种只在调速系统主电路过电流情况下起负反馈调节作用的环节,用来限制主电路过电流,因此它属于保护环节。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6409.html
点击查看答案
582.求线性有源二端网络内阻时,无源网络的等效电阻法应将电流源作()处理。
A. 开路
B. 短路
C. 保留
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6420.html
点击查看答案
107.一般工业机器人至少需要()个自由度,才能使手部达到活动范围内任意目标及姿态。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a641b.html
点击查看答案
353.()梯形图必须符合从左到右、从上到下顺序执行的原则。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6423.html
点击查看答案
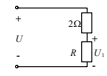
559.在下图所示电路中,电源电压U=6V。若使电阻R两端的电压U1=4V,则电阻R的阻值为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6409.html
点击查看答案
489.容积调速回路中,()的调速方式为恒转矩调节。
A. 变量泵—变量马达
B. 变量泵—定量马达
C. 定量泵—变量马达
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6a90-c091-da481f4a640b.html
点击查看答案
250.工业机器人的驱动方式中,直接驱动方式是指()。
A. 外部驱动机构驱动臂部的形式
B. 驱动机构与回转轴同轴式
C. 驱动机构与回转轴正交式
D. 驱动电动机安装在关节内部的形式
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a641a.html
点击查看答案
577.应用叠加定理求某支路电压或者电流时,当某独立电源作用时,其他电压源应()。
A. 开路
B. 短路
C. 保留
D. 以上都可以
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a641b.html
点击查看答案
389.()改变直流单臂电桥的供电电压值对电阻的测量精度也会产生影响。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a930-c091-da481f4a6421.html
点击查看答案









