



×
单选题

156.船舶在逆流航行中,为了保证船舶速度,采用()
A
最优控制
B
反馈控制
C
前馈控制
D
开环控制
答案解析
正确答案:C
解析:
题干解析:本题考查的是控制系统在船舶航行中的应用,特别是不同控制方式的特点及其在实际工程情境中的选择依据。
题目描述的情境是“船舶在逆流航行中,为了保证船舶速度”,这意味着外部环境存在干扰(即水流的反向作用),控制系统需要提前应对这种干扰,以维持设定的速度。
选项分析:
A:最优控制
最优控制的目标是在满足系统约束条件下,使某一性能指标达到最优(如能耗最小、时间最短等)。它通常涉及复杂的数学优化过程,并不专门针对外部扰动进行实时补偿。本题强调的是“保证速度”这一控制目标,而非追求某种最优性,因此不是最优控制的主要应用场景。
B:反馈控制
反馈控制是根据输出与期望值之间的偏差进行调节的控制方式。例如,当检测到船速降低时,再增加推进力。这种方式能够有效抑制扰动,但存在滞后性,因为必须等到扰动影响了输出之后才能做出反应。在逆流突增的情况下,反馈控制可能响应不够及时,难以“保证”速度的稳定。
C:前馈控制
前馈控制是基于对干扰的测量或预测,在干扰影响系统输出之前就采取控制动作。在本题中,若能检测到逆流的存在或强度,控制系统可提前增大推进力以抵消水流的影响,从而更有效地维持船速。这正是前馈控制的核心优势——提前补偿已知或可测的扰动。因此,在保证船舶速度的场景下,前馈控制更为合适。
D:开环控制
开环控制是指控制动作不受输出影响,按照预定指令执行。它无法应对外部扰动,一旦出现逆流,系统不会自动调整,船速必然下降。因此,开环控制不能保证在逆流中维持速度,不符合题意。
核心知识点:
- 反馈控制:基于偏差调节,具有滞后性,但能抑制多种扰动。
- 前馈控制:基于干扰测量,提前补偿,响应快,适用于可测且主要的扰动。
- 实际控制系统中,常采用前馈-反馈复合控制以兼顾动态响应与稳态精度。
正确答案为 C:前馈控制。
理由:在逆流航行中,为了提前抵消水流对船速的影响,需采用前馈控制,根据对逆流的感知提前调整推进力,从而有效保证船舶速度。
相关知识点:
逆流航行用前馈来控制
题目纠错
电气自动化
相关题目
单选题
362.为了消除由扰动所引起的系统误差,可用()来代替比例调节器。
单选题
361.有一调节器,其输出不仅取决于偏差的大小,同时与偏差存在的长短有关,这是一台()调节器。
单选题
337. 有一台PI电动调节器,其动特性如图所示,该调节器目前整定的积分时间是()
有一台PI电动调节器,其动特性如图所示,该调节器目前整定的积分时间是()
单选题
336.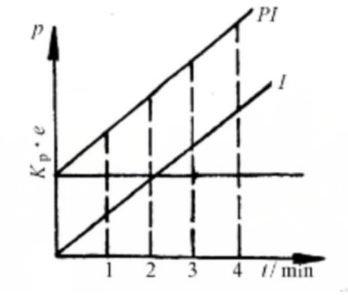 对PI调节器施加一个阶跃输入信号e,其输出特性如图所示,该调节器的积分时间Ti为()
对PI调节器施加一个阶跃输入信号e,其输出特性如图所示,该调节器的积分时间Ti为()
单选题
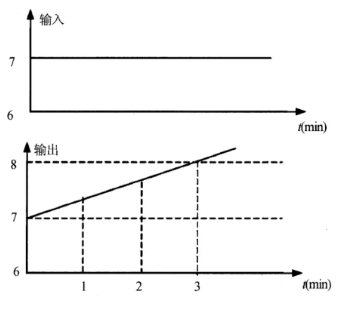
303.在采用PI调节器组成的控制系统中,给定值突然增大10%时,调节器的输出立即增大20%,3min后,调节器的输出又增加10%,则调节器的PB和Ti分别为()。
单选题
302.在采用PI调节器组成的控制系统中,给定值突然增大10%时,调节器的输出立即增大20%,3min后,调节器的输出又增加20%,则调节器的PB和Ti分别为()。
单选题
301.在采用PI调节器的控制系统中,当系统达到稳态时,调节器的()。
单选题
299.在PID调节器中,节流盲室和弹性气室分别在()、()气路中。
单选题
295.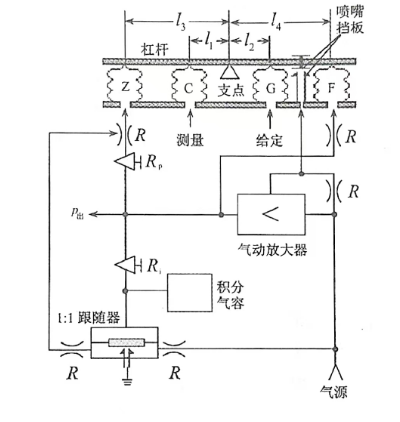 如图所示气动调节器是()调节器,该调节方式属于正作用式,当给定值减小时,输出()
如图所示气动调节器是()调节器,该调节方式属于正作用式,当给定值减小时,输出()
单选题
293.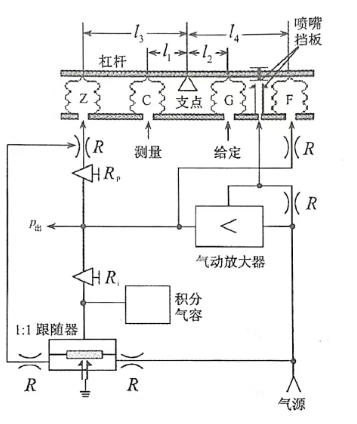 气动比例积分调节器如图所示,为了使调节器的负反馈作用增强,并使比例带增大,可以调节()的开度。
气动比例积分调节器如图所示,为了使调节器的负反馈作用增强,并使比例带增大,可以调节()的开度。






