



×
简答题
2、讲解下图二维 PID 控制系统的工作原理。
2、讲解下图二维 PID 控制系统的工作原理。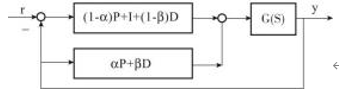
答案解析
正确答案:答案:为了使控制系统能对设定值变化和扰动变化都有较好的控制品质,在 DCS 中采用的二维PID控制。图中G(s)为被控对象的传递函数。在计算机控制中,PID 三项是独立的,图中的二维PID 控制系统是在 PID 功能块中增加两个 参数,对偏差和过程变量分别计算,对过程变量进行微分先行的运算,即比例和微分作用, 对偏差是比例和积分作用。当 α=β=0 时,就是常规的PID,控制输出与偏差成常规的PID 关系。 α=β=1 时,得到积分和比例微分之和,只要调整α 、 β 的值,可以使系统达到好的 控制品质。
相关题目
单选题
1. [判断题] COM722 模块无需中继即可最多连接 64 个 DP 从站。
单选题
30. [判断题] VF3.1 及之前版本,用户功能块一旦被调用,就不能再修改用户功能块的名称,但可以修改 其注释。
单选题
29. [判断题] COM741-S 模块通讯组态,不能在 VF 软件的”硬件配置 “中直接组态,可在”硬件配置 “下 的通讯组态软件中直接组态。
单选题
28. [判断题] 组态管理软件只能打开默认工程。
单选题
27. [判断题] VisualField3 软件中,为用户集成了非常多的先进控制功能块,如:FLC 模糊控制、PFC 预 测控制、SMITH 预估器、PID_TUN 回路自整定等,这些功能块均可在程序页中直接使用,不 需要授权。
单选题
26. [判断题] AI731-S 模块测热电阻信号时,在测量范围内,温度显示值完全由阻值决定,与工程量量程 无直接关系,量程只起限制其在HMI 的显示范围的作用。
单选题
25. [判断题] MODBUS 起始地址从 1 开始,即对设备 0~15 号寄存器进行读取,组态应设置为 1~16。
单选题
24. [判断题] 系统功能块的组态参数,联机调试时一般不可在线修改,必须先在组态中修改,再下载后才 能生效。
单选题
23. [判断题] VF 软件支持单站导入导出功能。
单选题
22. [判断题] ECS-700 系统中,操作节点数大于或等于 10 时,组态服务器的操作系统需使用Windows Server 2003。






