



×
判断题

数控机床开环进给系统精度和快速性较闭环系统好.
A
正确
B
错误
答案解析
正确答案:B
解析:
数控机床的开环进给系统虽然在一定程度上可以提高系统的快速性,但是由于无法实时纠正误差,其精度相对闭环系统较低。闭环系统可以通过反馈信号实时调整控制参数,提高系统的精度和稳定性。因此,数控机床开环进给系统的精度和快速性并不一定比闭环系统好。
相关知识点:
数控机床开环,不如闭环精
题目纠错
技师电工(官方)
相关题目
单选题
晶闸管触发导通后,其门极对电路( ).
单选题
CMOS集成电路的输入端( ).
单选题
使用TTL集成电路时应注意,TTL的输出端( ).
单选题
下列电路属于单极型器件集成的应是( ).
单选题
对逻辑函数进行化简时,通常都是以化简为( )表达式为目的.
单选题
8421600码(001010000010)所表示的十进制数是( ).
单选题
与二进制数(11011010)相对应的十进制数为( ).
单选题
如图所示电路中,晶体管V的ICM=200mA,BVCEO=45V,工作在开关状态,使用后发现管子经常损坏,共主要原因是( ).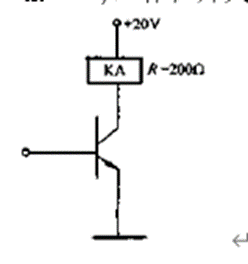
单选题
在开关型稳压电源中,开关调整管应始终处于( ).
单选题
在直流稳压电路中,效率最高的是( ).






